- Home
-
Product
- General-purpose Motorized Translation Stage
- Motorized Vacuum Translation Stage
- Controller
- Integrated Motorized Stages
- Manual Translation Stage
- Optical Mechanical Components
- Optical Table
- Hexapods 6-Axis Positioning Stages
- Air Bearing Translation Stage
- Application Software
- Customization Services

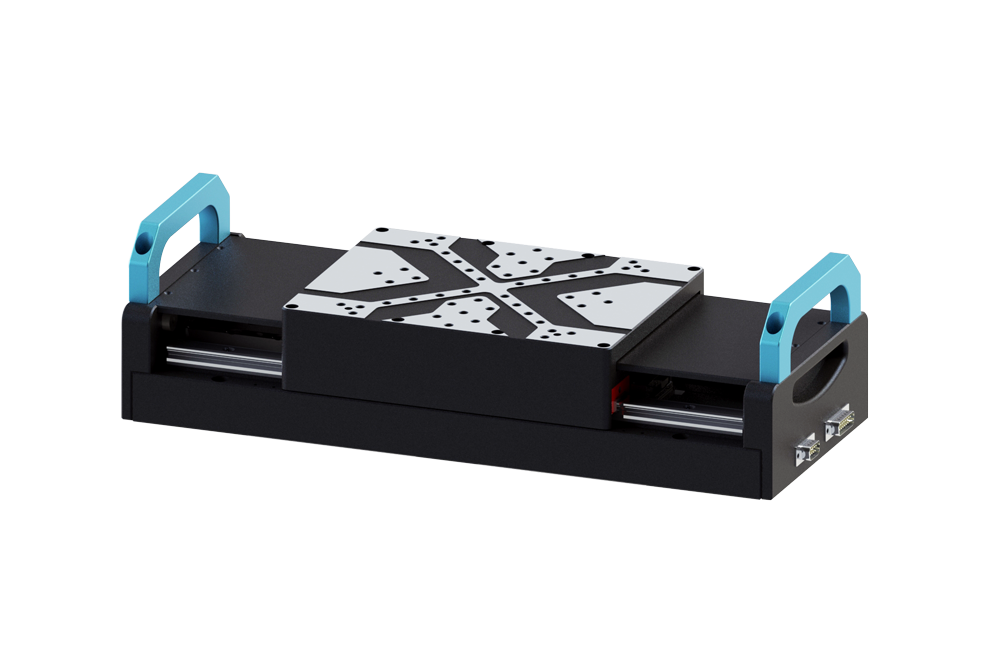
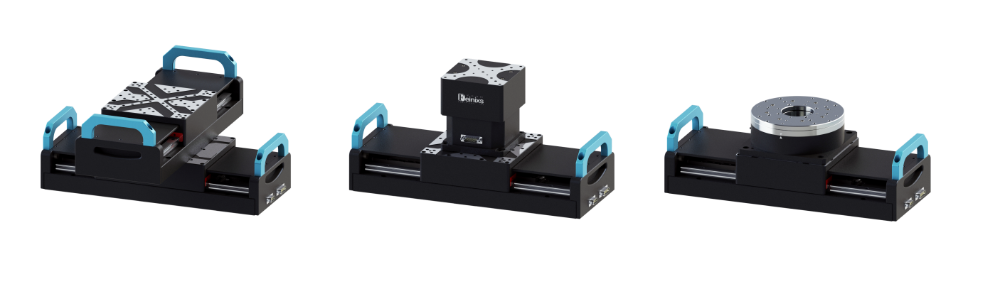
 Motorized Translation Stage
Motorized Translation StageFeinixs specializes in precision motion control, offering a range of motorized translation stages renowned for their high accuracy, high performance, and exceptional reliability. These stages provide precise linear positioning and motion control solutions for a wide array of demanding applications in fields such as optics, life sciences, semiconductor manufacturing, and nanotechnology.
-
Data download
Data Download Data download
-
Application area
Application Area Application area
-
News Center
News News Center
-
About Us
About Us About Us
Search